Chris Breaux
Mechanical Engineering - Robotics and Autonomous Systems
Corner Balance
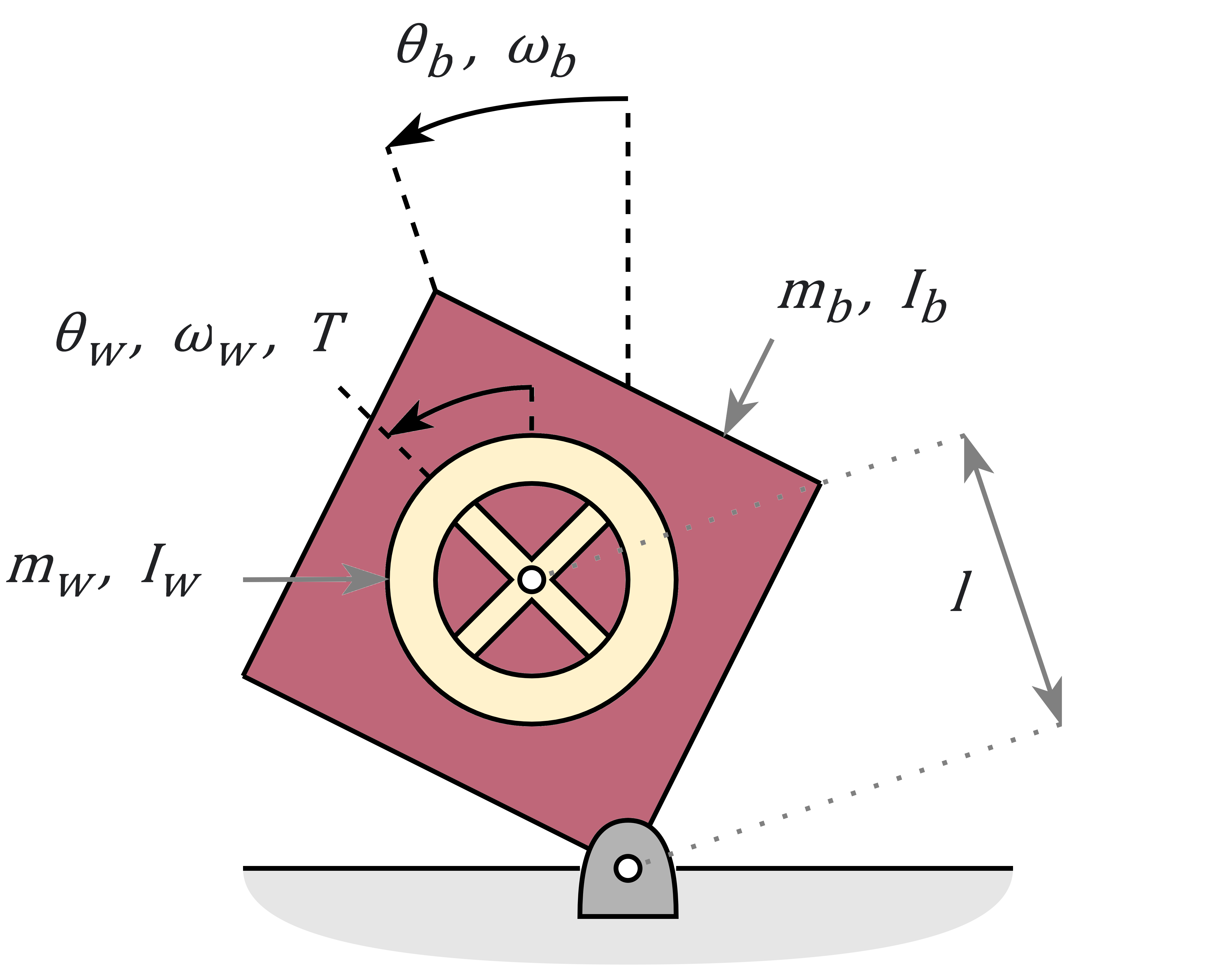
Flywheel Inverted Pendulum Model
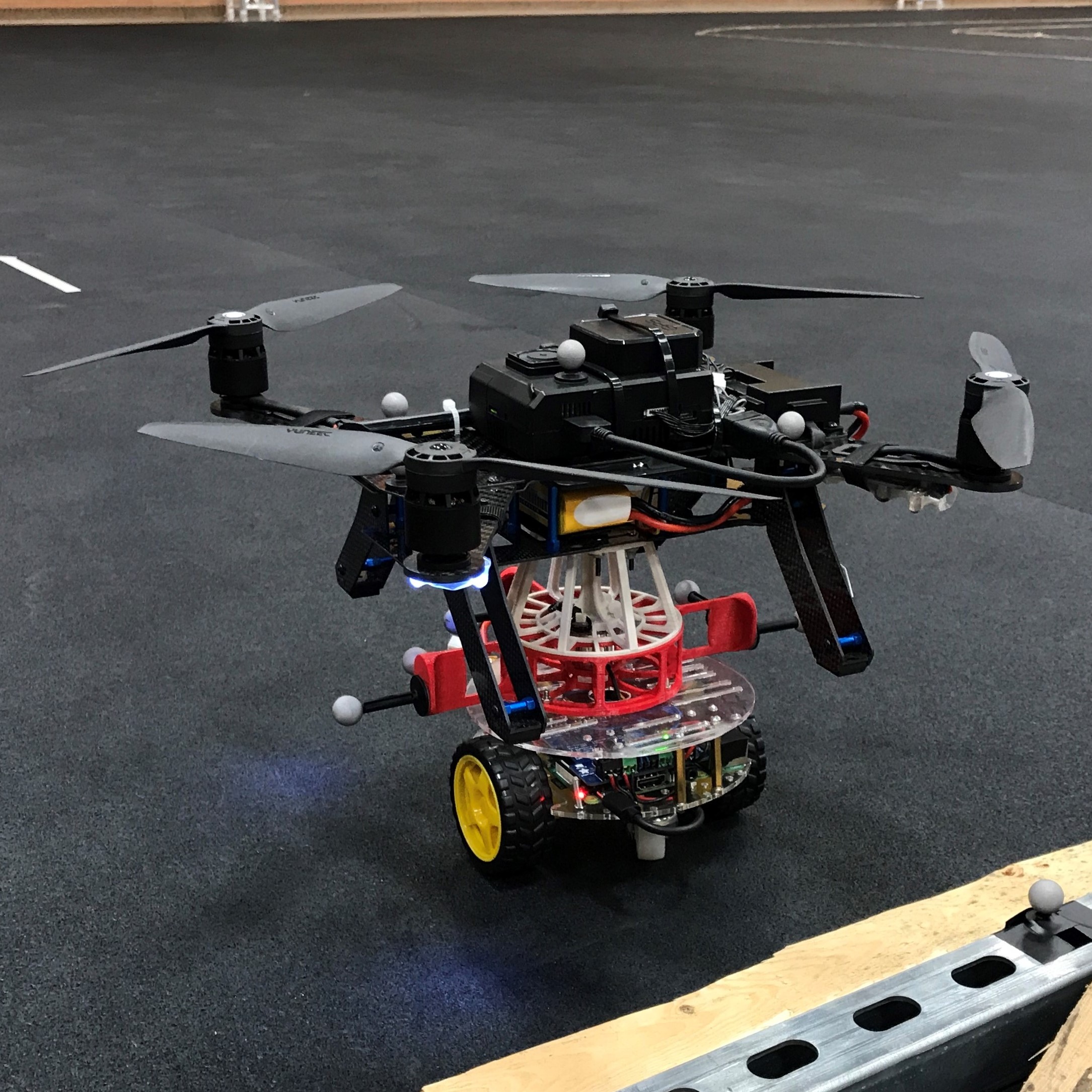
Coupled configuration
Lifting phase
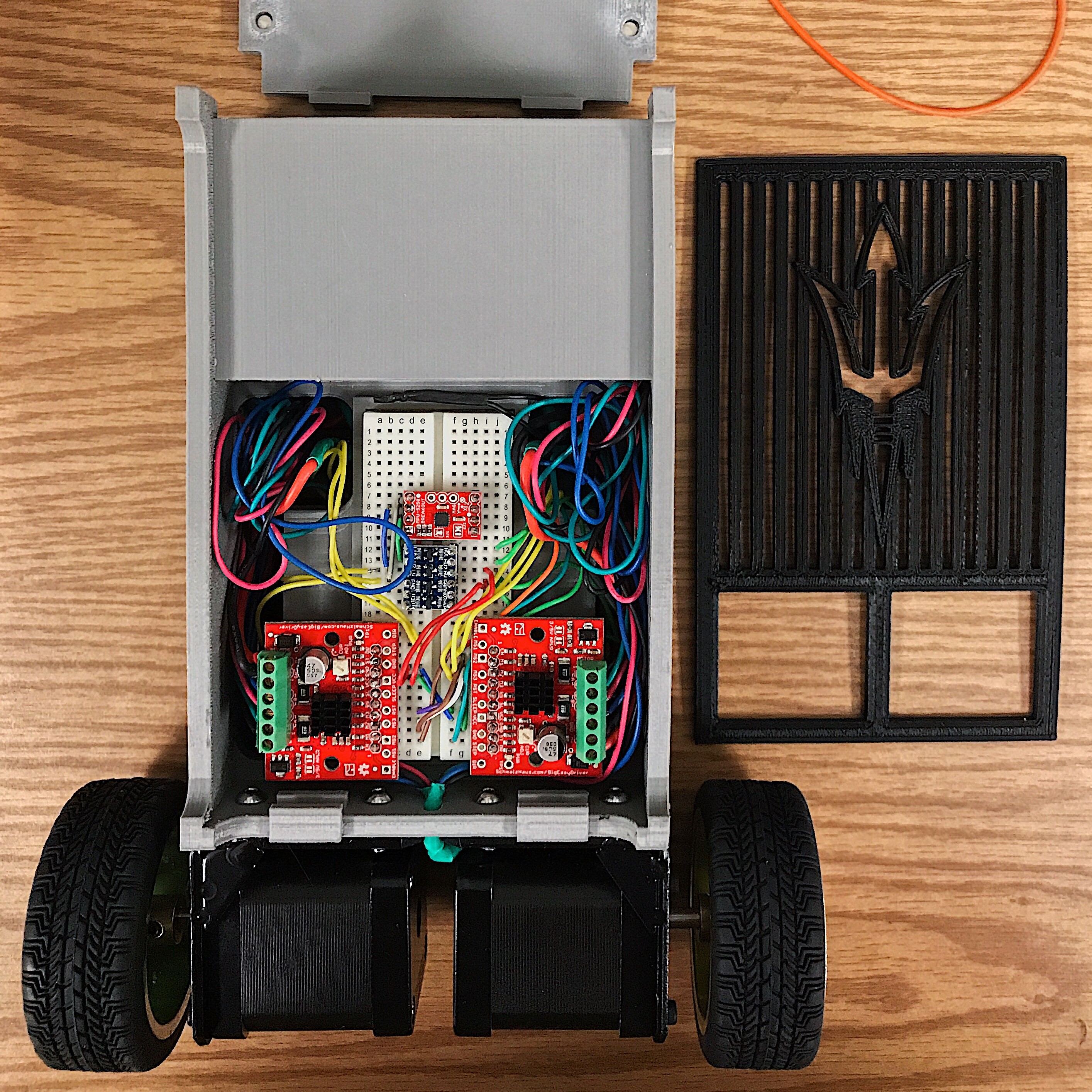
Final Assembly
Rear Internals
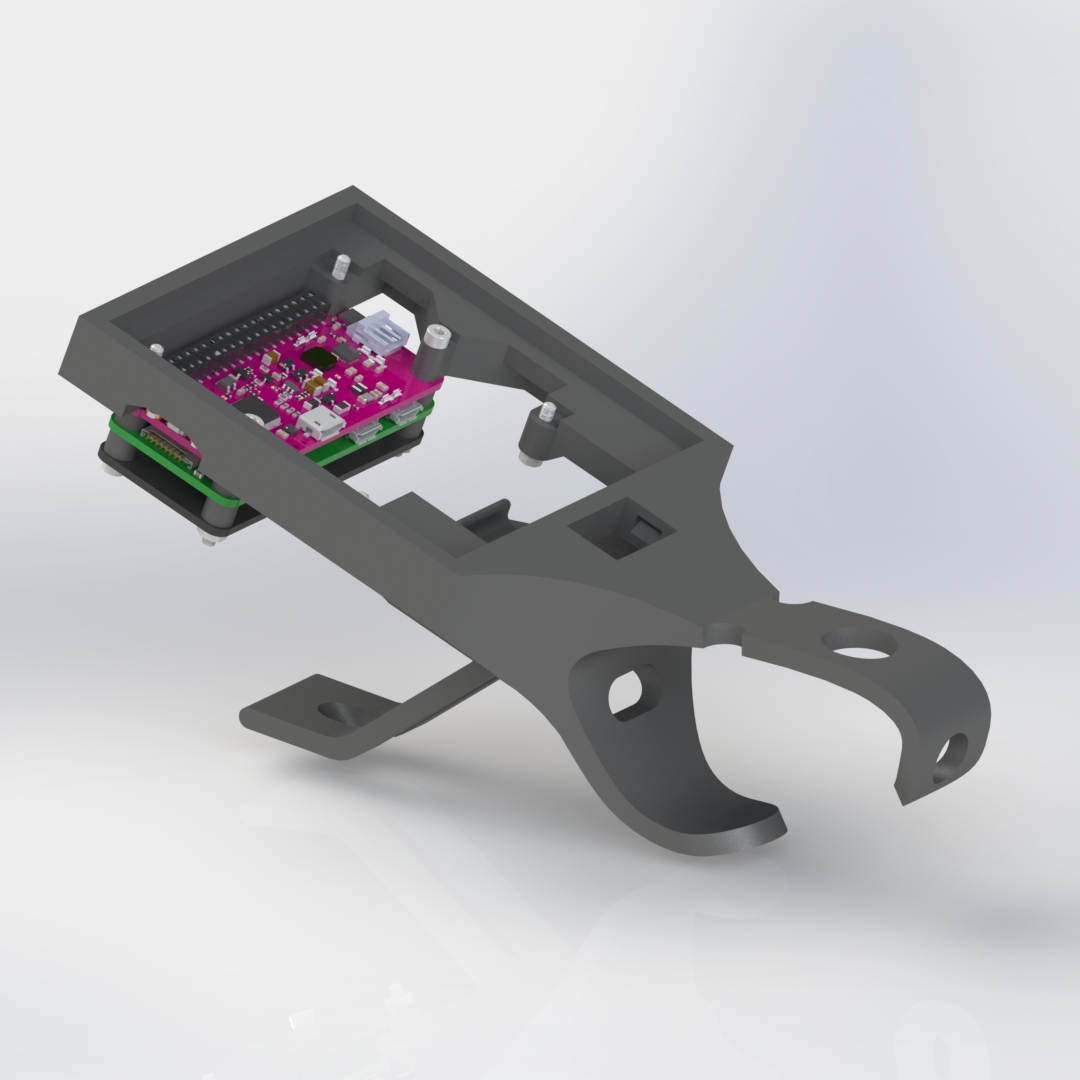
Chassis
Wing Prototype
Wing Simulation
Penguin-Inspired Bubbler Internals
Penguin-Inspired Bubbler Test
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}